
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
Portfolio item number 1
Short description of portfolio item number 1
Portfolio item number 2
Short description of portfolio item number 2
publications
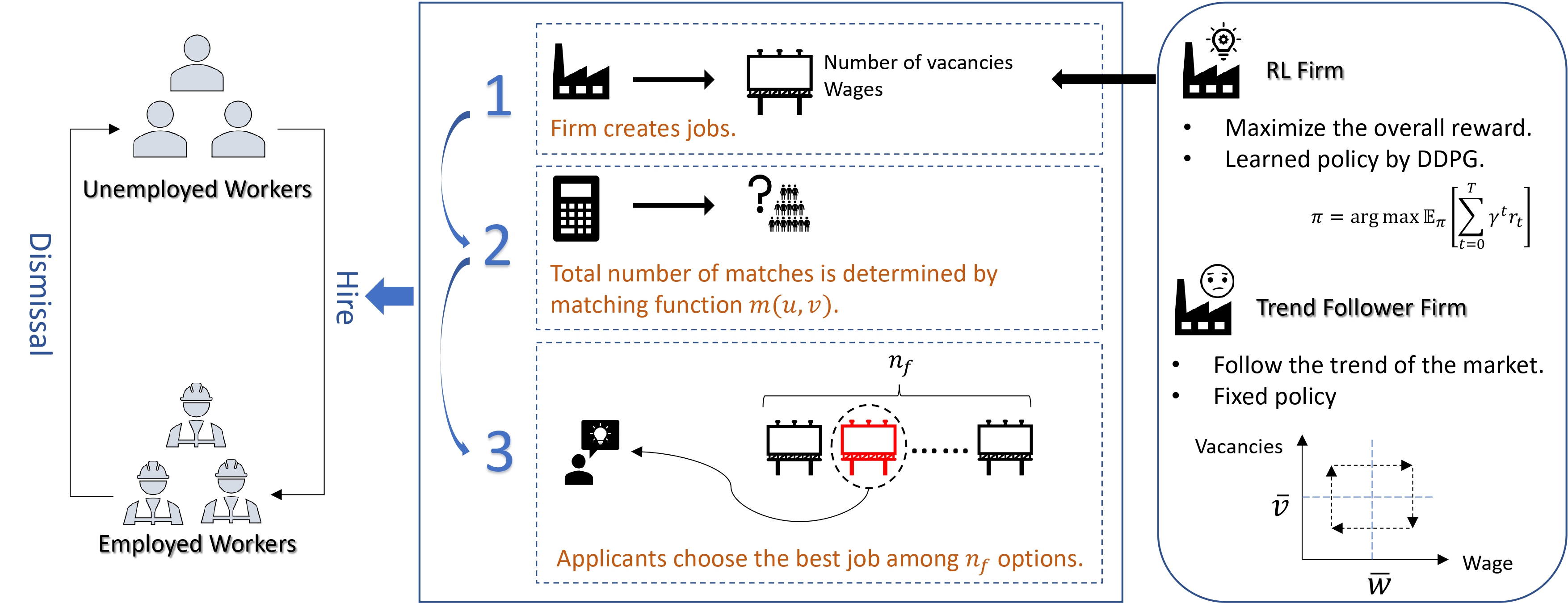
Deep Reinforcement Learning in Labor Market Simulations
Published in 2025 IEEE Symposium on Computational Intelligence for Financial Engineering and Economics (Trondheim, Norway), 2025
Recommended citation: Chen, Ruxin; Zhang, Zeqiang. (2025). "Deep Reinforcement Learning in Labor Market Simulations." 2025 IEEE Symposium on Computational Intelligence for Financial Engineering and Economics (CiFer). Trondheim, Norway.
Download Paper
Autonomous Learning From Success and Failure: Goal-Conditioned Supervised Learning with Negative Feedback
Published in Arxiv, 2025
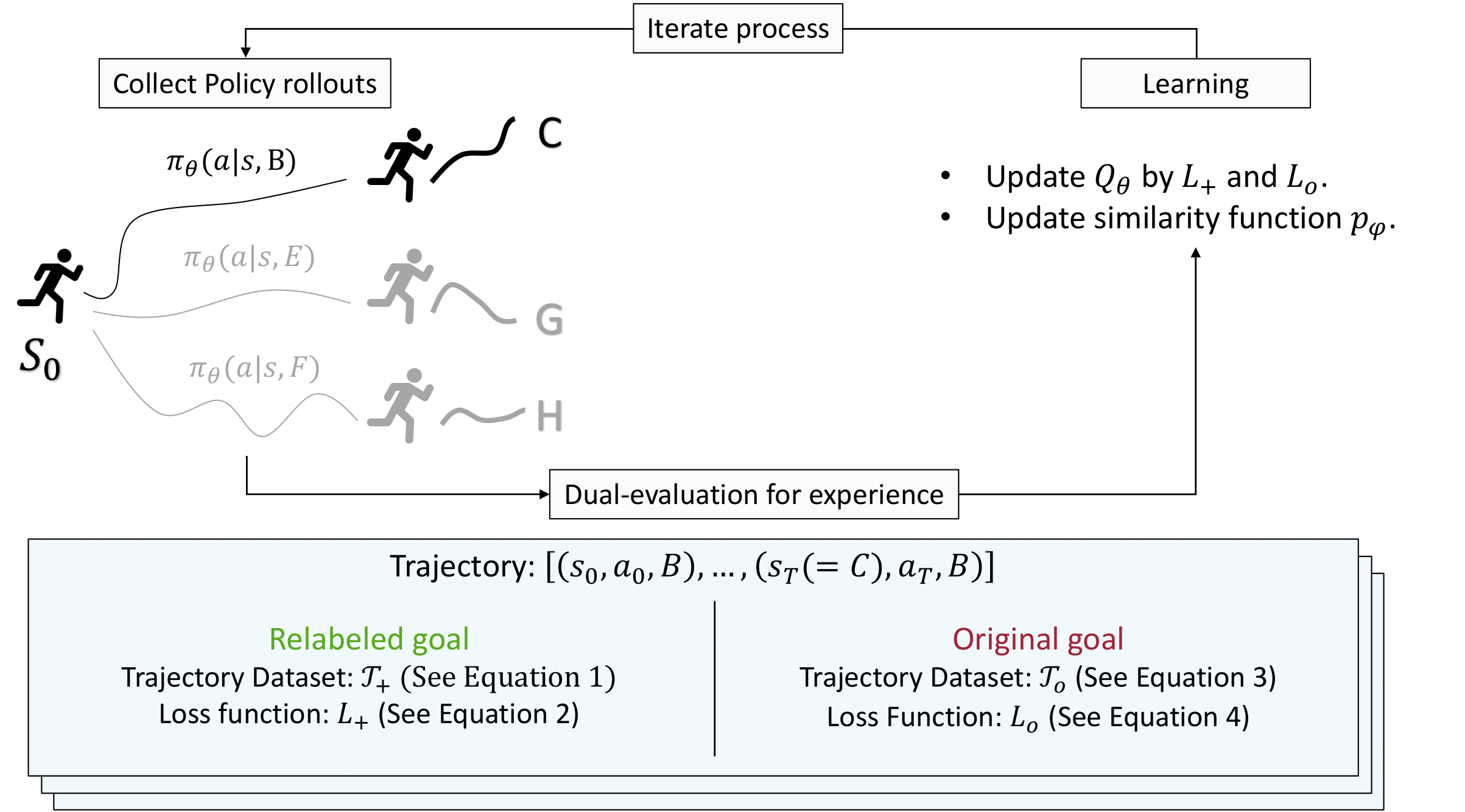
Recommended citation: Zhang, Zeqiang; Wurzberger, Fabian; Schmid, Gerrit; Gottwald, Sebastian; Braun, Daniel. (2025). "Autonomous Learning From Success and Failure: Goal-Conditioned Supervised Learning with Negative Feedback." Arxiv.
Download Paper
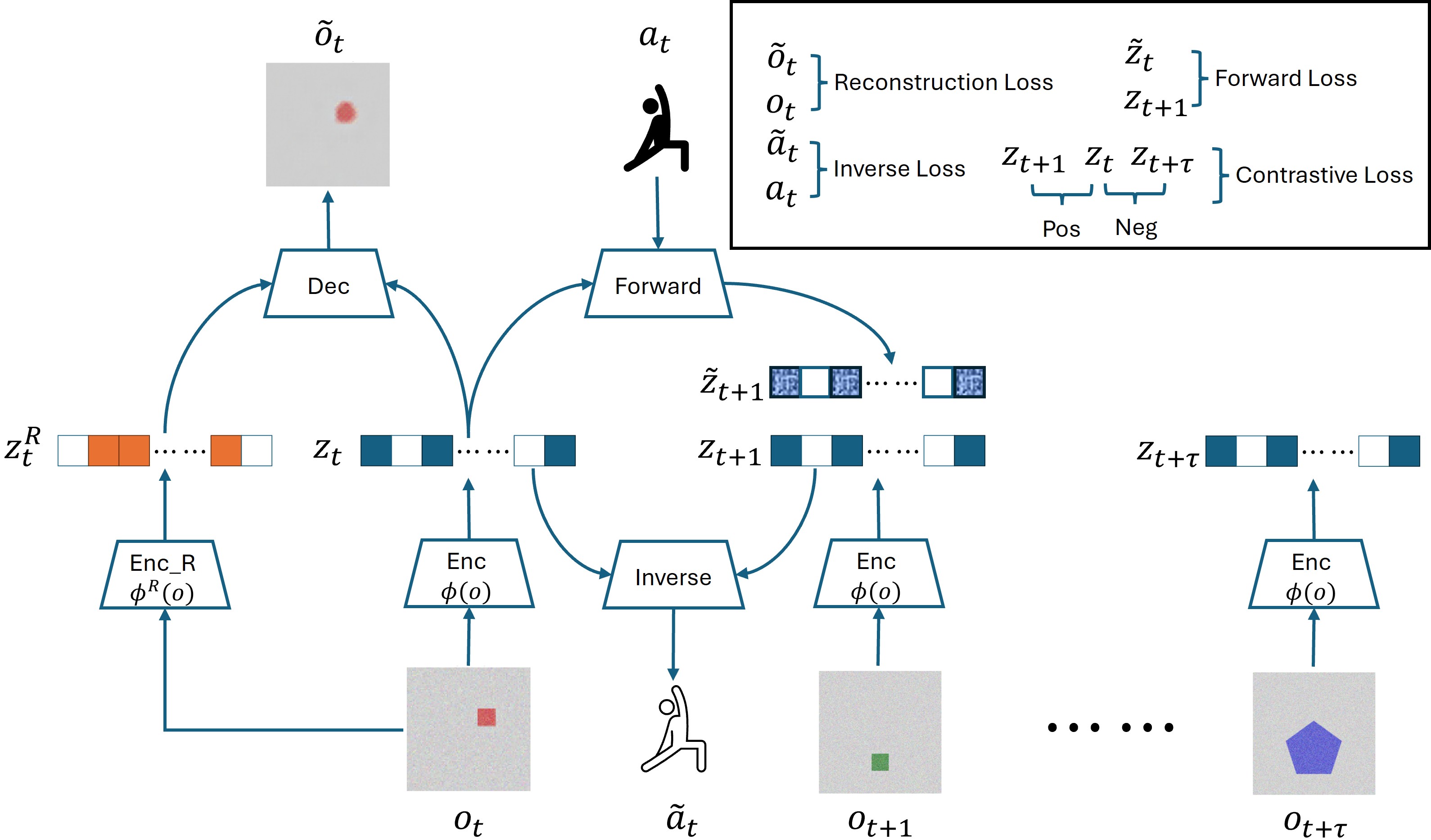
Learning Robust Representations for World Models without Reward Signals
Published in 18th European Workshop on Reinforcement Learning (Tüebingen, Germany), 2025
Recommended citation: Zhang, Zeqiang; Wurzberger, Fabian; Gottwald, Sebastian; Braun, Daniel. (2025). "Learning Robust Representations for World Models without Reward Signals." 18th European Workshop on Reinforcement Learning. Tüebingen, Germany.
Download Paper
From Individual Learning to Market Equilibrium: Correcting Structural and Parametric Biases in RL Simulations of Economic Models
Published in Arxiv, 2025
The application of Reinforcement Learning (RL) to economic modeling reveals a fundamental conflict between the assumptions of equilibrium theory and the emergent behavior of learning agents. While canonical economic models assume atomistic agents act as “takers” of aggregate market conditions, a naive single-agent RL simulation incentivizes the agent to become a “manipulator” of its environment. We demonstrate this discrepancy within a search-and-matching model with concave production, showing that a standard RL agent learns a non-equilibrium, monopsonistic policy. Additionally, we identify a parametric bias arising from the mismatch between economic discounting and RL’s treatment of intertemporal costs. To address both issues, we propose a calibrated Mean-Field Reinforcement Learning framework that embeds a representative agent in a fixed macroeconomic field and adjusts the cost parameter to reflect economic opportunity costs. Our iterative algorithm converges to a self-consistent fixed point where the agent’s policy aligns with the competitive equilibrium. This approach provides a tractable and theoretically sound methodology for modeling learning agents in economic systems within the broader domain of computational social science.
Recommended citation: Chen, Ruxin; Zhang, Zeqiang. (2025). "From Individual Learning to Market Equilibrium: Correcting Structural and Parametric Biases in RL Simulations of Economic Models." Arxiv.
Download Paper
A Cognitive Perspective on Information Frictions in Labor Markets
Published in Entropy, 2025
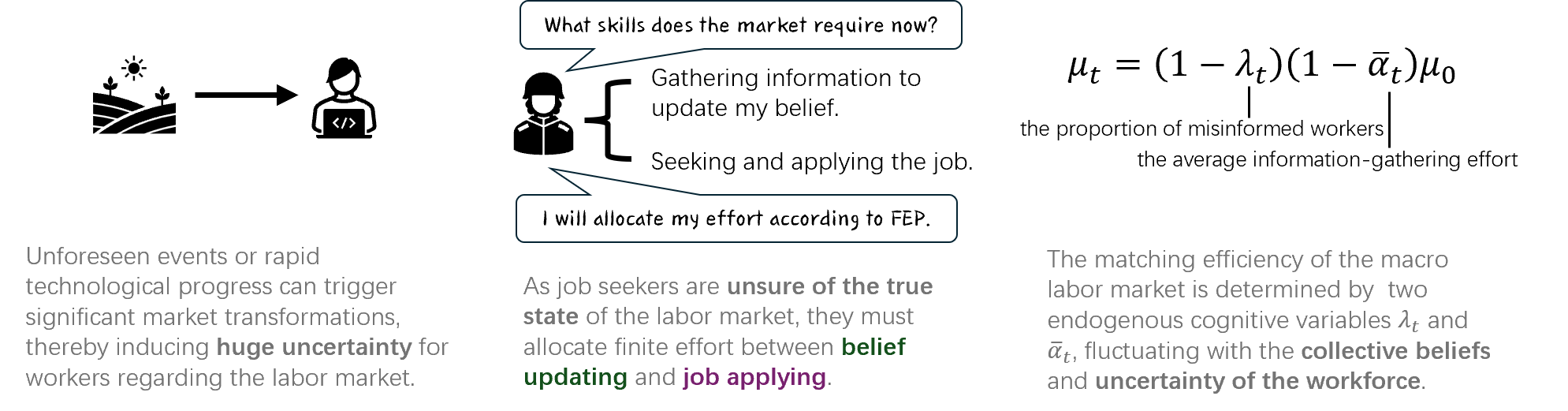
Recommended citation: Zhang, Zeqiang; Chen, Ruxin. (2025). "A Cognitive Perspective on Information Frictions in Labor Markets" Entropy. 27(12).
Download Paper
Characterizing Failure Mechanism of Soft and Hard Rocks: Implication from Acoustic Emission and Machine Learning
Published in Rock Mechanics and Rock Engineering, 2026
At the laboratory scale, differentiating damage evolution mechanisms between soft and hard rocks and objectively identifying stress states are prerequisites for uncovering rock instability failure mechanisms. To comparatively analyze the differences in the failure processes of soft and hard rocks, this study systematically investigated the fracture evolution characteristics of samples of both rock types using acoustic emission (AE) parameters, and developed a machine learning-driven rock fracture state classification model. The results indicate that: soft and hard rocks exhibit significantly distinct phased characteristics in AE frequency, energy, and peak frequency across stress stages; the evolution process of internal microcracks in rocks was revealed through AE event location, average frequency (AF) and rise angle (RA) information; the evolution patterns of b-value and information entropy across “counts-spatial-energy” dimensions were analyzed, clarifying distinct failure mechanisms between soft rocks’ progressive plastic deformation and hard rocks’ abrupt brittle failure; the stress stages of soft and hard rocks were classified based on AE multi-parameters using machine learning classification methods, and the classification model showed high accuracy while quantitatively ranking feature importance. These findings not only effectively identify differences in fracture mechanisms between soft and hard rocks at the laboratory scale, but also highlight the potential of machine learning models for processing AE time-series data.
Recommended citation: Li, Zhuang; Zhang, Zeqiang; Xu, Nuwen; Gao, Feng; Li, Biao. (2026). "Characterizing Failure Mechanism of Soft and Hard Rocks: Implication from Acoustic Emission and Machine Learning." Rock Mechanics and Rock Engineering.
Download Paper
Hierarchical Goal Abstractions via Learned Subset Relations
Published in Forty-third International Conference on Machine Learning (Seoul, South Korea), 2026
In self-supervised goal-conditioned reinforcement learning (RL) without external rewards, goals are typically specified by observations sampled from experience. However, depending on the observation structure, such a fixed representation of goals may be either too concrete (requiring exact pixel-level matches) or too abstract (involving ambiguous observations). Here we propose the construction of hierarchical latent goal spaces that integrate both concrete and abstract goals. To this end, we use an energy function to learn a partially ordered space, in which a subset relation between observations naturally induces a hierarchy from concrete to abstract goals. This representation enables agents to disambiguate specific states while also generalizing to shared concepts. In experiments on navigation and robotic manipulation, agents trained with our hierarchical goal space achieve higher task success and greater generalization to novel tasks compared to agents limited to purely observational goals.
Recommended citation: Wurzberger, Fabian; Gottwald, Sebastian; Zhang, Zeqiang; Braun, Daniel. (2026). "Hierarchical Goal Abstractions via Learned Subset Relations." 43rd International Conference on Machine Learning (ICML). Seoul, South Korea.
Download Paper
talks
Learning Contrastively: A Novel Goal-Conditioned Supervised Learning Approach with Dual-evaluation Mechanism
Published:
Zeqiang Zhang, Fabian Wurzberger, Gerrit Schmid, Sebastian Gottwald and Daniel Braun (Poster Presentation) link
Temporal goal abstraction for goal-conditioned reinforcement learning
Published:
Fabian Wurzberger, Zeqiang Zhang, Gerrit Schmid, Sebastian Gottwald and Daniel Braun (Poster Presentation) link
Deep Reinforcement Learning in Labor Market Simulations
Published:
Ruxin Chen and Zeqiang Zhang. (Poster and Oral Presentation) link
Simulating Labor Market Dynamics with Agent-Based Models
Published:
Ruxin Chen and Zeqiang Zhang. (Poster Presentation) link